概要
相模原市では、老朽化が進む公共インフラの維持管理が喫緊の課題となっています。
市が管理する道路網は総延長2,401kmにおよび、その点検の中には職員が車両で巡回し、目視で確認を行う日常パトロール点検も含まれます。
しかしこの方法では、以下の問題が浮上している。
・点検範囲の偏りや見落とし
・報告書作成・データ整理の負担
・蓄積データの活用不足
課題を解決するために、画像認識とデータで点検をサポートし、
新しい道路パトロール体制の実現を目指す。
目的
道路パトロール業務の「見落とし」「点検ムラ」を解消するため、画像認識・GIS・音声記録によるデジタル化で、より効率的な道路管理を実現する
目標
画像認識による劣化検出精度を80%に向上
報告書の入力を80%以上自動化を実現
想定クライアント
相模原市土木部
機能概要
・GPS情報自動プロット
車載カメラで検出した劣化箇所のGPS座標を記録、その後データベースに保存して地図上に表記。点検位置を漏れなく記録。
・劣化面積・路面状況データ表示
画像内の劣化箇所ピクセル数とカメラからの距離情報を元に実面積を算出。補修計画立 案に必要な詳細情報をダッシュボードに表示。
・データのフィルタリング
GISに表示される劣化地点に含まれる様々なデータからフィルタリングを行えるようにすることで、検索性を向上させる。
・ボイスメモ機能
劣化箇所を認識すると同時に音声を録音し、単独パトロール中でも画像だけでは把握し づらい現場での生の観察やノウハウを補足する音声メモを即座に記録できる機能。
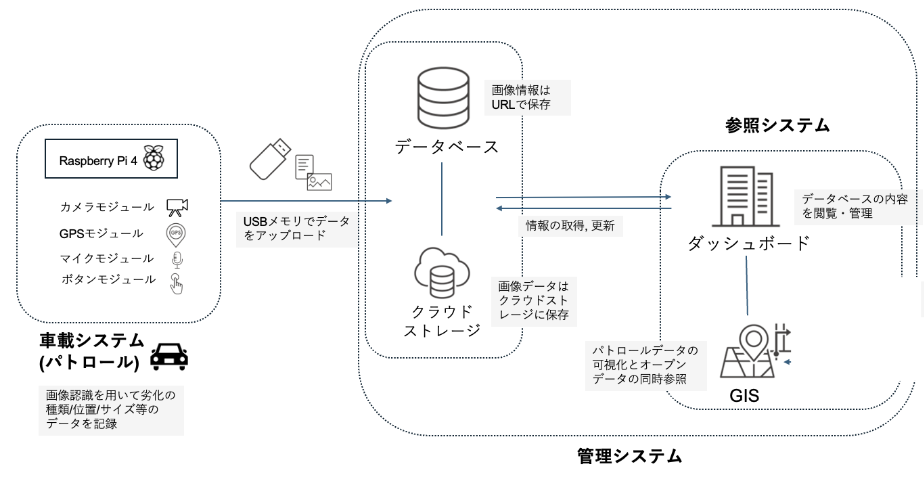
システム構成図
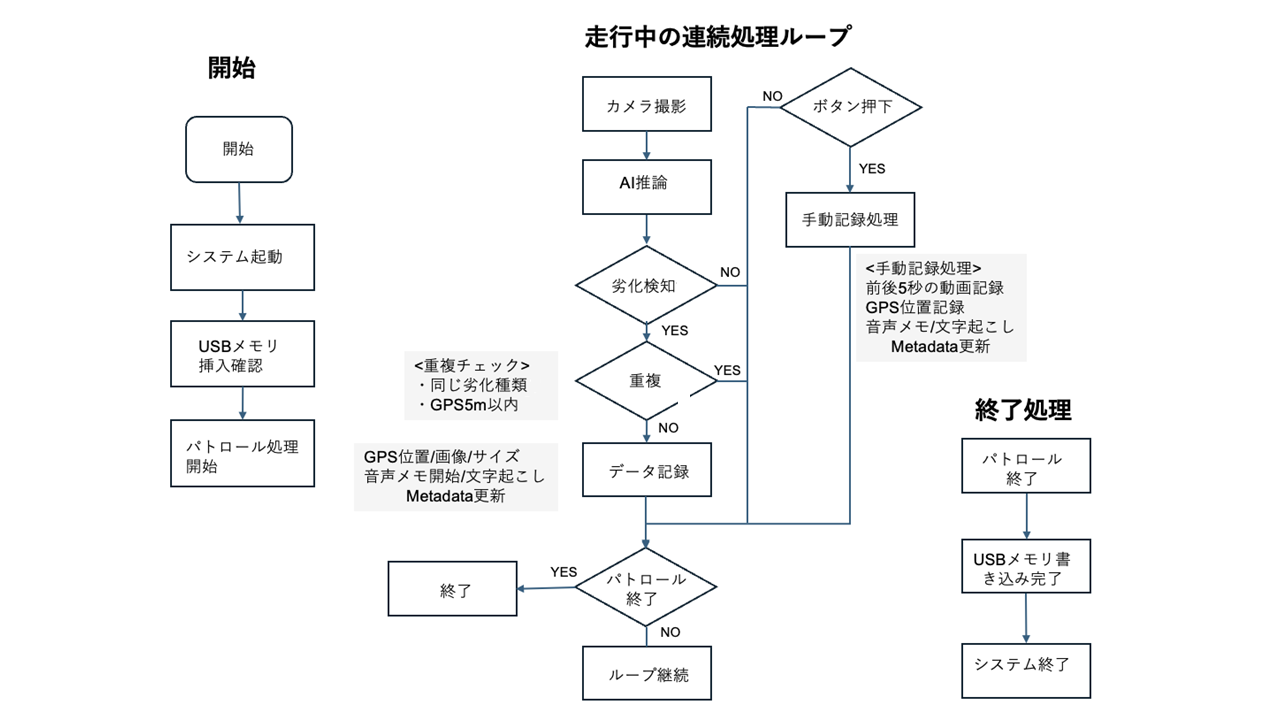
処理フロー図
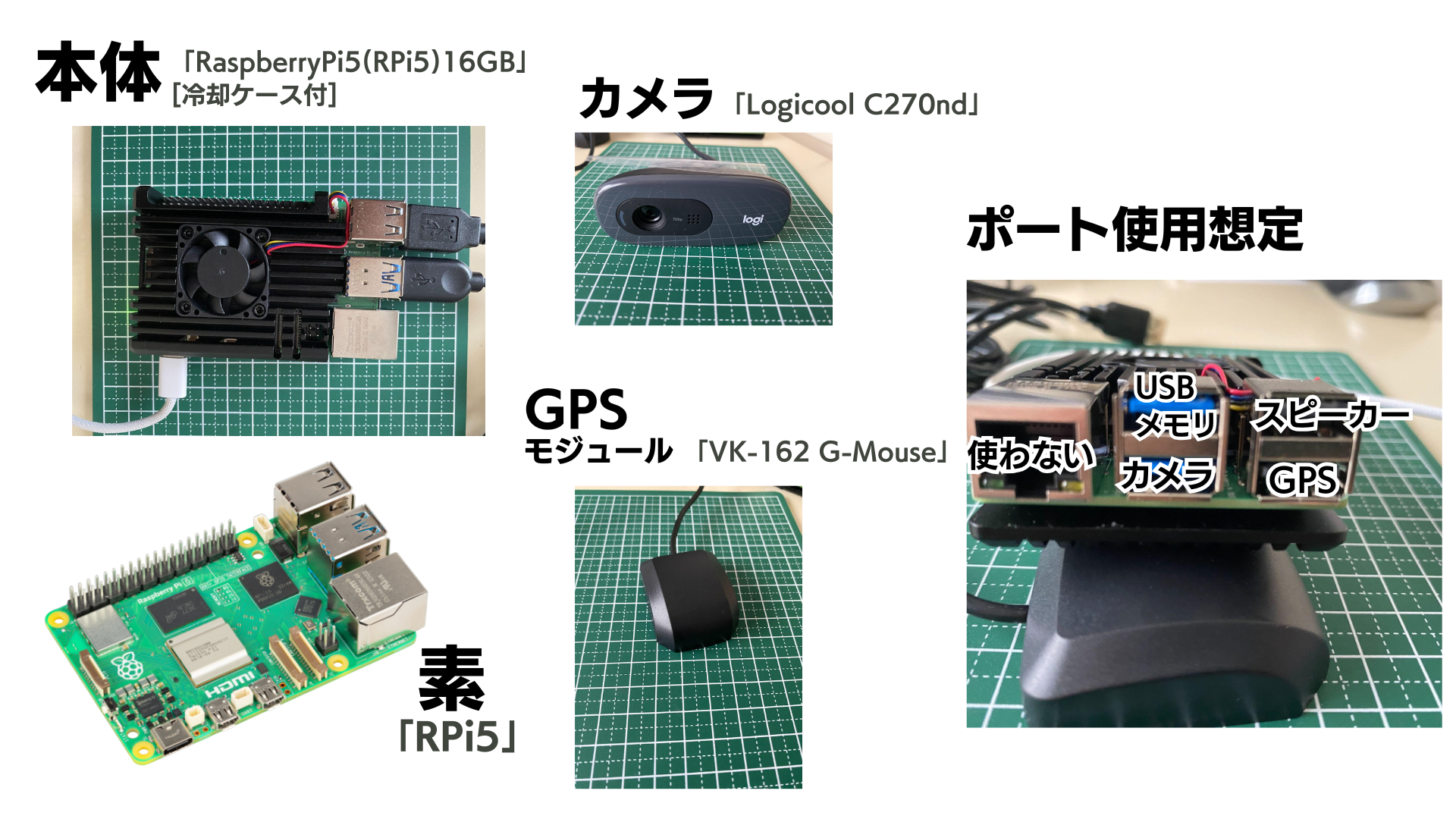
デバイス(モジュール)詳細
検知例
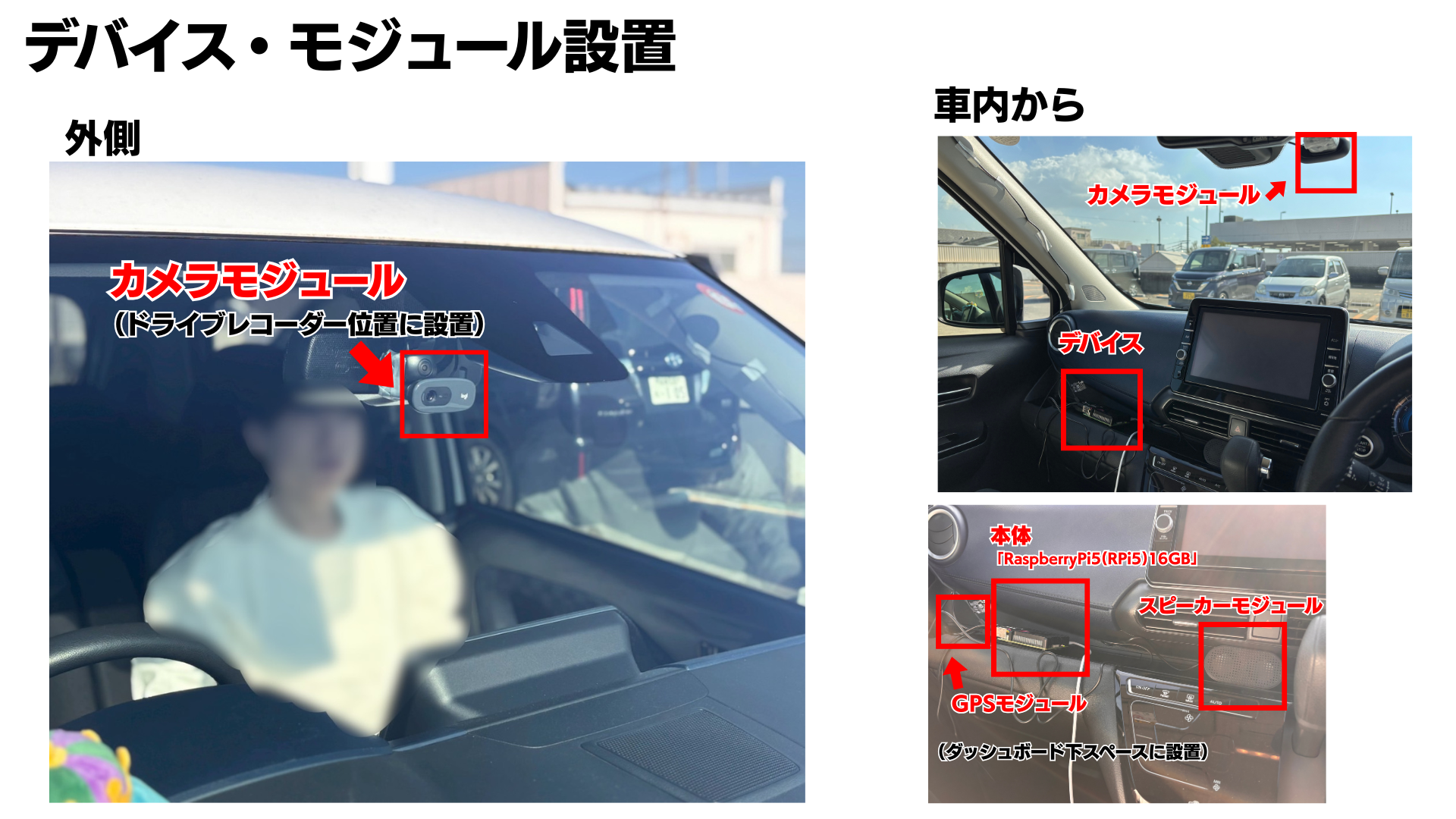
上記のように設置をする。(自家用車で検証)


開発環境
- 言語:Python , JavaScript , HTML , CSS
- エディタ:Visual Studio Code
- バージョン管理:GitHub
- データベース:Firebase
- クラウドストレージ:Firebase Storage
- 推論モデル:YOLOv8s
- 推論エンジン:OpenVINO
- GIS: Google Maps API , Geolocation API
- 音声文字起こし:Vosk
- OS:Mac , Windows , Linux(Raspberrypi5, SSH遠隔開発)
動作環境
- 巡回:自動車 管理:データベース閲覧システム(PC)
メンバー
PM 橋本 陸生
半田 悠翔
中道 健介
橋田 拓真
不動 龍之介
堀籠 航大