概要
自動運転検討用シミュレータの外界環境開発において、地理情報を用いれば誰でも、道路の高低差や道路構成要素が配置されたモデルを利用できるようにすることを目的とし、最終成果物として、湘南台駅へ行く途中にある「桐原交差点」周辺の交差点と秋葉台体育館の駐車場付近を回るテストコースを作成し、コース上に車のオブジェクトを配置した精度検証用ドライブシミュレータを開発する。
プロジェクトの目的
・自動運転用シミュレータの外界環境開発において、地理情報を用いれば誰でも、道路の高低差や道路構成要素が配置されたモデルを利用できるようにする 。
プロジェクトの目標
・国土地理院の地図情報を用いた高低差のある地理情報を取得し、 道路構成要素を配置したテストコースを作成する。
・手作業で行っている道路の面張りとオブジェクト配置を自動化する 。
・クライアントの要望に従い、テストコース上を走行する車両に新型の車両運動モデルを適応し、接続する。
成果物
blender上での交差点
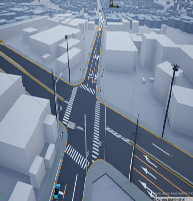
Unreal Engine4 上での交差点
開発環境
・モデリングに使用したソフト
・Blender 2.8
・Blender 2.79

・Autodesk 3dsmax 2019
・地図データの読み込みに使用
・ 基盤地図情報ビュアー 4.00
https://fgd.gsi.go.jp/download/menu.php よりダウンロード可能です
・QGIS 2.14
・マテリアル作成に使用
・Substance painter

・Adobe Photoshop CC 2018
・マテリアル作成及び外界環境開発に使用
・ Unreal Engine 4.22
・ Unreal Engine 4.23
メンバー
プロジェクトマネージャ 長尾 圭太
プログラマ 小笠原 正輝
モデラ 開藤 偉久
プログラマ 川村 将太
マテリアル担当 山田 望
石川晧平