目次
概要
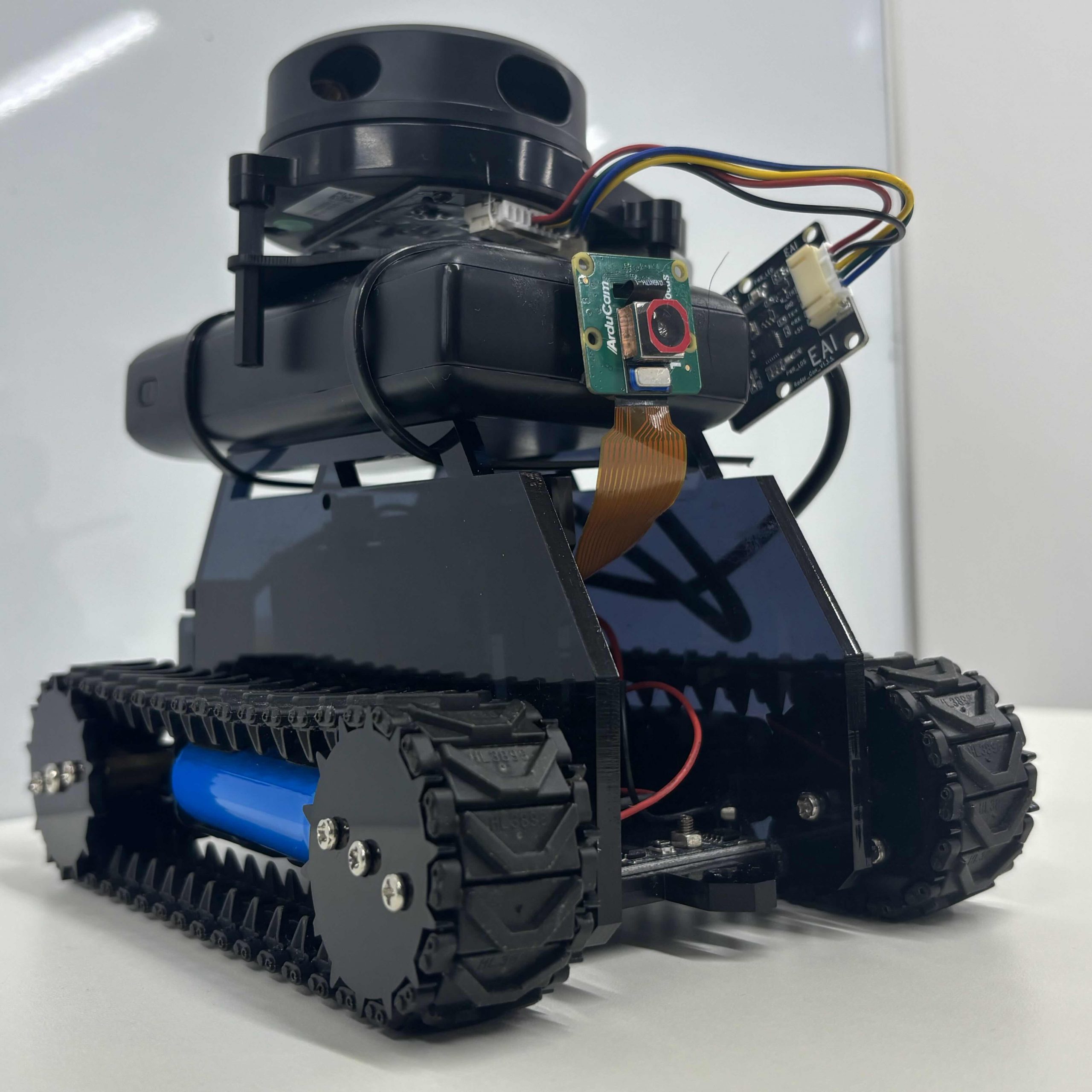
・自走ローバーが葛飾区の植物園を一人で巡回して花の写真を撮ってくる。
・撮ってきた写真に対してAIの画像認識を利用して植物園の花に病気がないかを解析。
・撮った花の状態をまとめて表示して、花の健康の異常有無にかかわらず全ての写真を 閲覧可能。
・巡回後は報告書を自動作成することがで業務を自動化。
・今まで職員が手動で撮影、記録を行っていたが本システムの代用により運用負担を減らすことができる。
・今までは職員の経験や知識が多く必要だったが、本システムは誰でも使用することができ属人化を防ぐことができる。
・定点カメラなどと違い景観に影響を与えることがなく必要な時だけ走らせることで業務を行うことができ、ドローンのように運用の許可制限もない。
・一度手動で走らせることでルートを党えるので複数の植物園に代用可能となっている。
目的
| 属人化が進んでいる植物園のモニタリング業務においてデータを用いた持続可能な業務体制の確立 |
目標
| 年間作業時間削減 260h → 78h(▲70%) |
| ローバー巡回:週2回×45分×50週 |
想定クライアント
東京都 葛飾区 公園課
メンバー
- 横井善敬 プロジェクトマネージャー
- 崎枝祐治 プログラマー
- 岩田柊 デザイナー
- 中島龍之介 デザイナー
- 日之西海聖 プロジェクトマネージャー補佐
- 福崎晴太 プログラマー
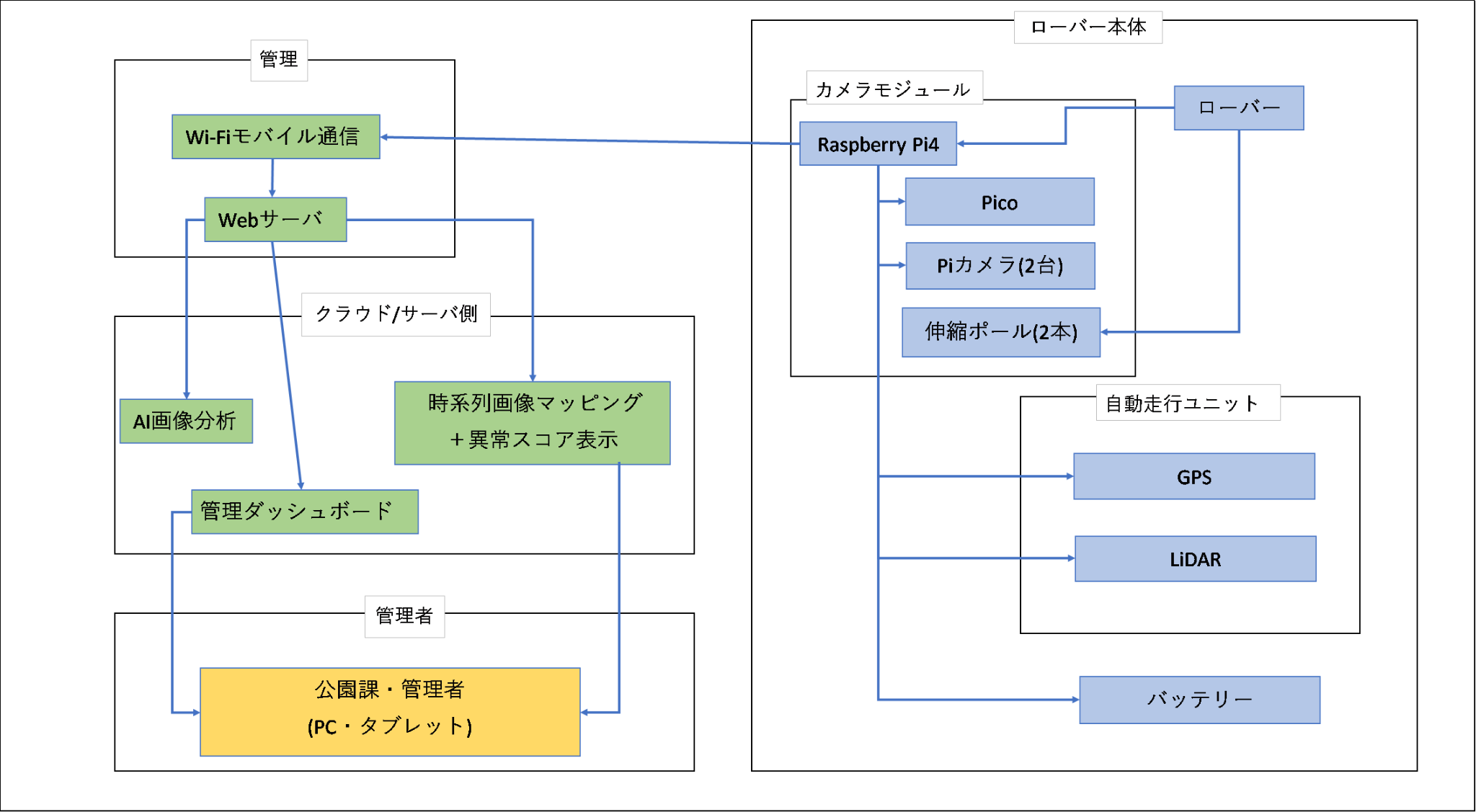
システム構成図
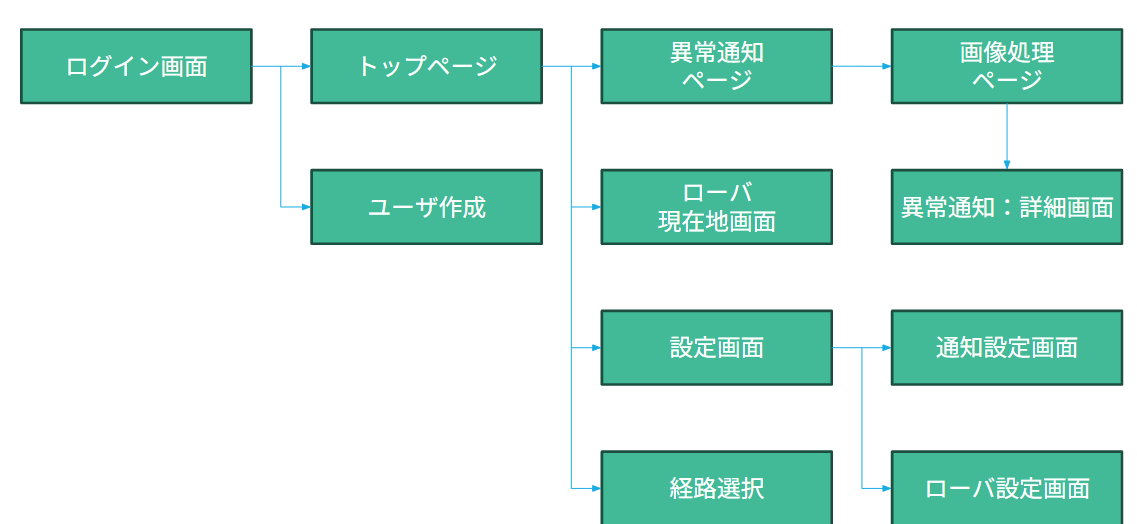
画面遷移図
使用モジュール
使用言語
- Python
- HTML
- CSS
開発環境
- VS code
データベース
- SQLite
使用技術
- OpenCV
- TensorFlow
- ReportLab
- flask
- websocket