概要
簡単な説明を伝えるだけで,操作が伝わるような,直感的かつ安全にドローンを操作できるシステムを開発し,その操作性を評価する.その評価の際に項目を設け,移動時間や走行経路をデータとして分析,正常に操作ができるか,正しい動作ができているかを確認し,よりよい操作方法を開発する.項目にそってシステムをより安全に・正確に・スムーズに・直感的な操作システムの開発を行い,よりよい操作システム開発を目指す.
メンバー
| 氏名 | 担当 |
|---|---|
| 畦地 大輔 | プロジェクトマネージャ |
| 吉田 周生 | プログラマ |
| 松塲 匠 | プログラマ |
| 原 歩夢 | プログラマ |
| 角田 真和 | 測定・評価者 |
| 輿石 能成 | 測定・評価者 |
プロジェクトの背景
ドローンの操作方法で,一般的なコントローラによる操作や,あらかじめプログラミングされた自立制御があげられる.また,音声操作などが挙げられるが,認識までに時間がかかる為,細かな操作が不可能である.
そこで我々は,より直感的に操作できるシステムはないのだろうかと考え,本プロジェクトを立ち上げた.
目的と目標
| 目的 | 目標 |
|---|---|
|
|
開発
操作システム
本プロジェクトにおいて,様々な操作システムを設計する前提として,共通となるシステムの設計を行った.ドローンの探索,接続から操作コマンドの送信部などを設計したうえで,安全対策のため,Androidのライフサイクルに従ってドローンを緊急着陸するシステムを導入した.
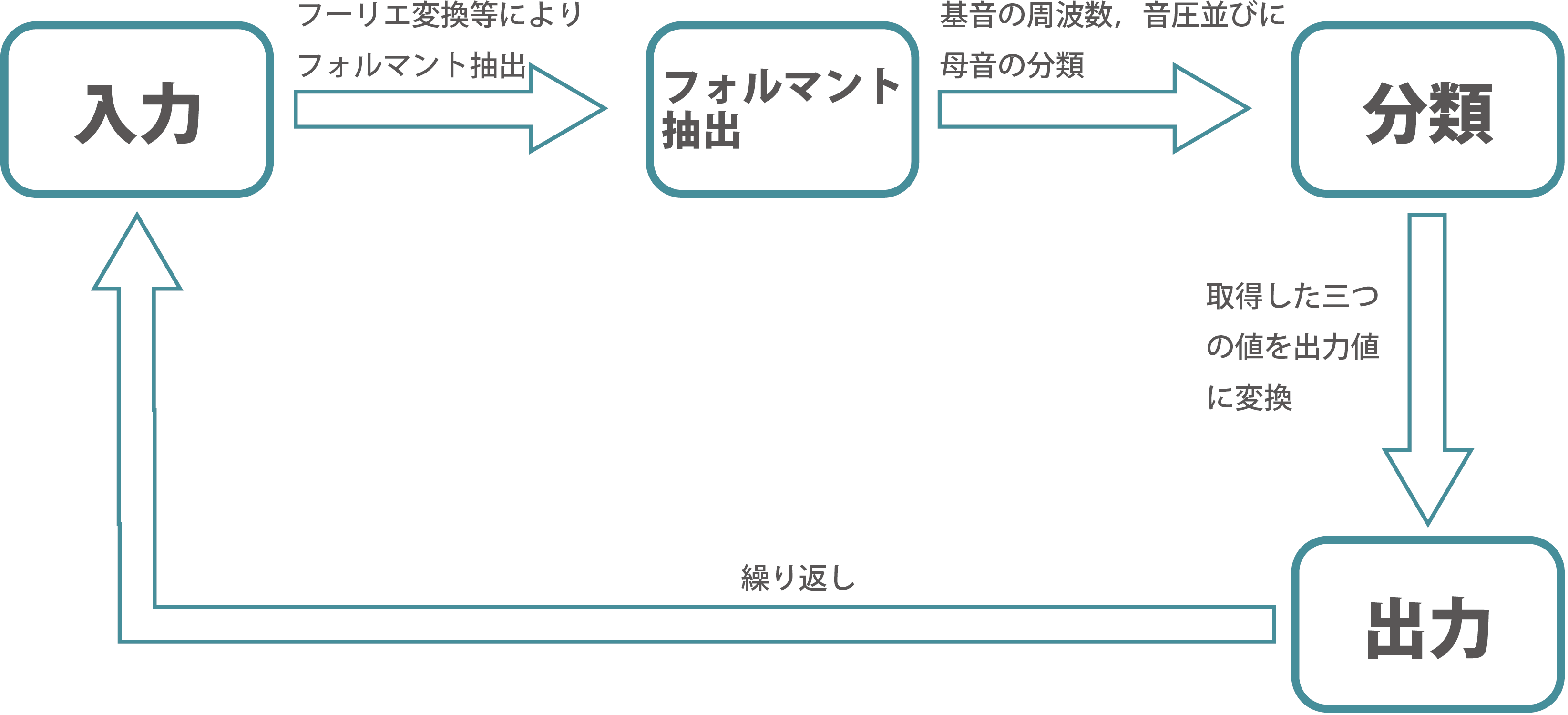
音を用いた操作システム
音声情報を用いたシステムでは,従来の音声認識によるコマンド入力に比べ,認識スピードが向上した.発生している音声の,基音の周波数,dB値と母音の分類分けによる三軸の値を出力の三値に変換し割り当てている.母音の分類においては,声の高さや質が変化すると,フォルマントが大きく変化するため,値の設定を工夫した.
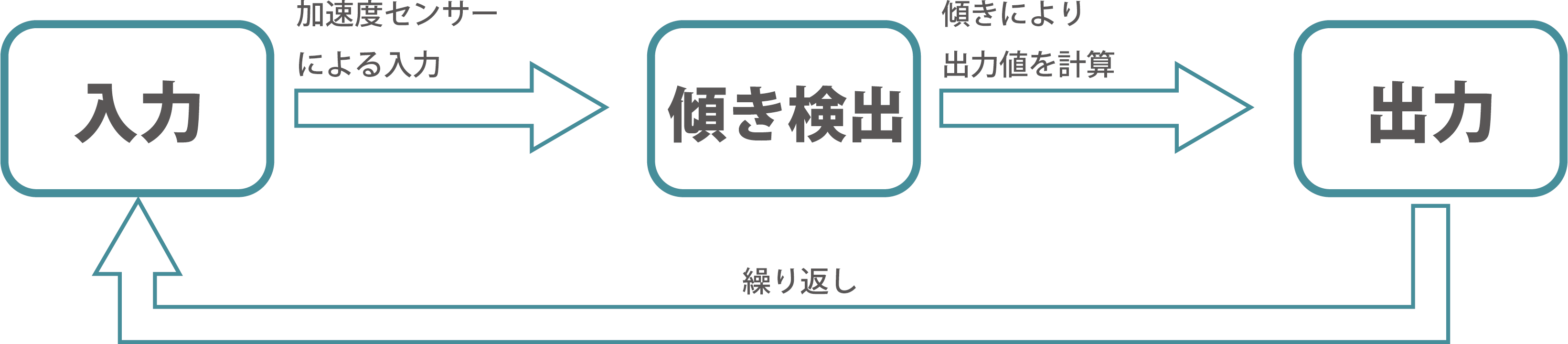
加速度センサーを用いた操作システム
加速度センサーを用いたシステムでは端末の傾きを検出し,その傾きの度合いにより出力値を決定する.直観的な操作を可能とするため,出力値への変換部の微調整を行った.
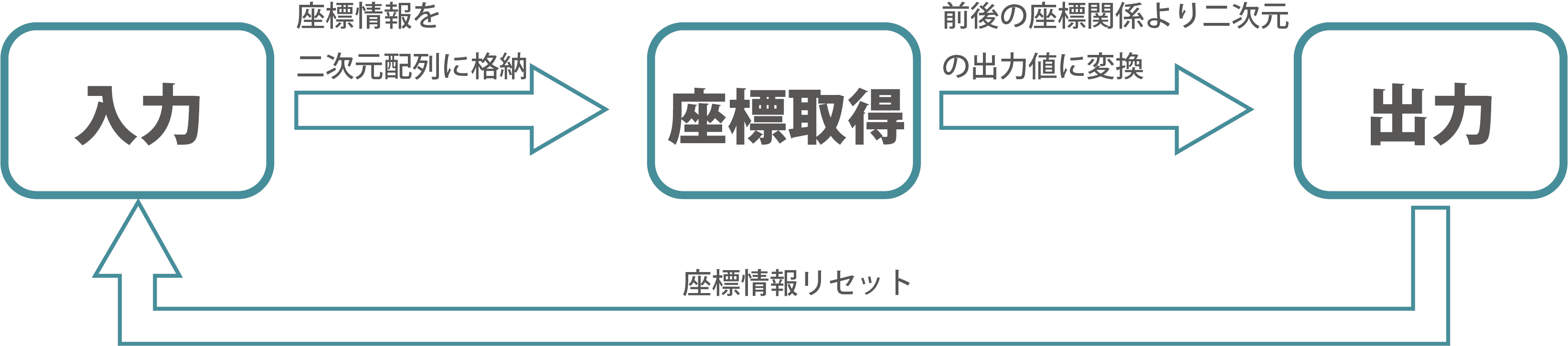
筆跡を用いた操作システム
筆跡情報をドローンの操作システムに変換するにあたって,進行方向を変えるとき,ドローンの加速度の影響で描画通りに動かない問題があった.この問題に対処するためドローンの加速を計算し,進行方向変化時に逆方向への出力を与え,速度を落とす対処をした.
HoloLensを利用した評価システム
開発したシステムを評価するため,複合現実を実装できるMicrosoftのHoloLensを利用したシステムを開発した.後述の評価項目に即した評価ができるとともに,様々な状況に対処するため評価コースの編集も可能とした.
評価項目
我々の目標である3つの項目をクリアしているかを確認するために,評価項目を設け,実際に操作をし評価を行う.その時に取得した情報を元に,システムの比較および改善をしてプロジェクトを進めていく.
| 評価基準 | 評価項目 |
|---|---|
| 安全システム | それぞれのシステムで緊急停止 |
| 安全なシステム | アプリケーションが正常に行えない場合の緊急停止 |
| 安全な操作 | 5mの直線上に1m間隔で障害物を設置し,左右に避けながら目標地点を通過するまでに,所要した時間 |
| 直観的な操作 | 初期地点から4m前方に地点を一つ設置し,そこから2m右方,さらに3m後方,3m左方に移動したときに,所要した時間 |
| 適切な操作 | 5m前進するのに,所要した時間 |
| 適切な操作 | 目標の地点への着陸ができるか |
開発環境
使用機器
- Pallot社製ドローン Manbo
- Microsoft HoloLens
使用端末
- Android (OS ver 6.0未満)
使用ソフトウェア
システム開発
- Android Studio 2.2.2,2.3.3
- SDK ver 24,26
- Unity 2017.1.0f3
- Visual Stadio
- Visual Basic 2017
- Visual C# 2017
画像制作・デザイン
-
- Adobe Photoshop
- Adobe Illustrator